|
I am currently a Second-year Ph.D student at UCSD Advanced Robotics and Controls Lab (ARClab), advised by Prof. Michael Yip. Prior to that, I received a M.S in Computer Science degree at UCSD and a B.S in Computer Science at University of Washington. Google Scholar / Email / Github / Resume |
|
|
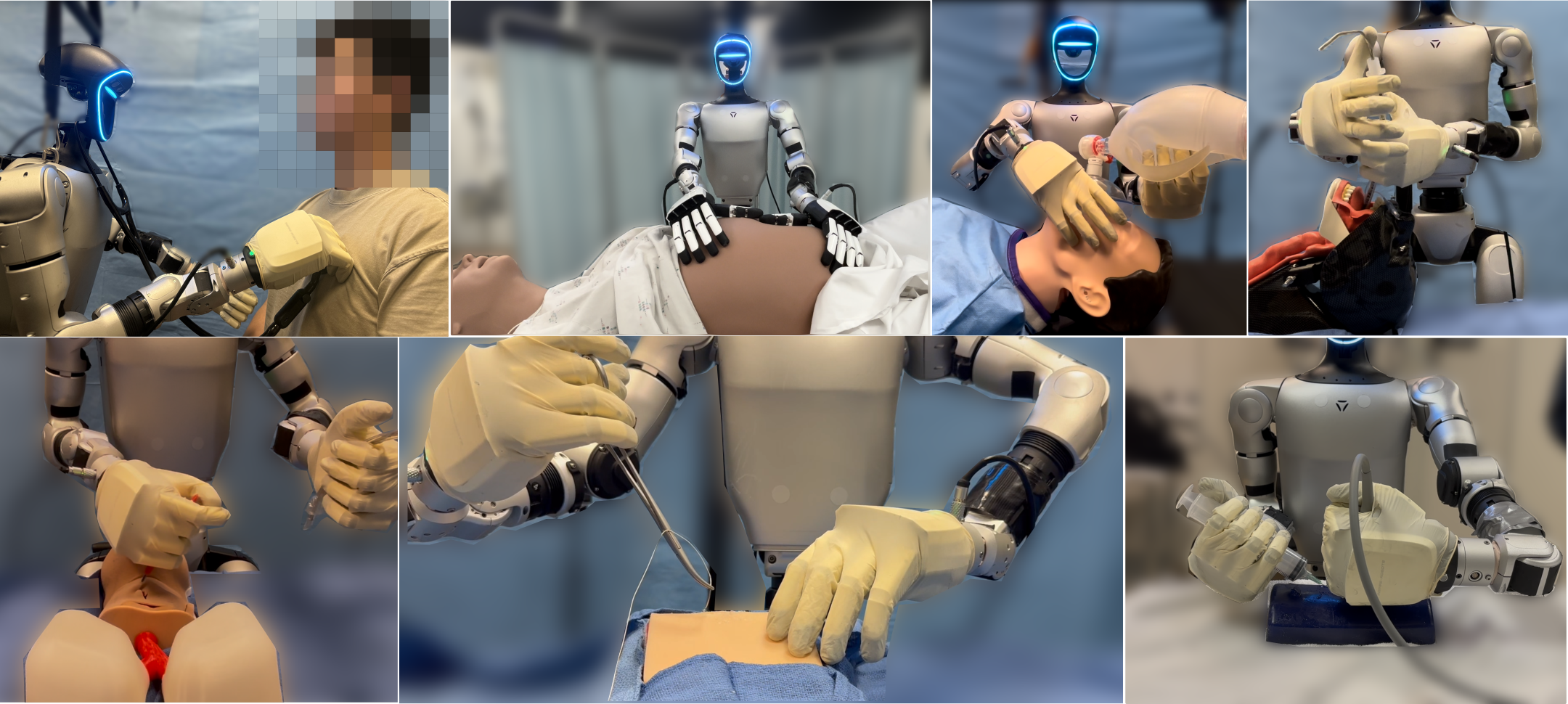
I'm interested in the intersecting fields of robotics, physics simulation, and machine learning. I develop machine learning algorithms and physics simulation models to achieve robot autonomy in manipulation tasks, specially involving soft, deformable objects in surgical scenarios. |
|
|
|
|
Soofiyan Atar, Xiao Liang*, Calvin Joyce*, Florian Richter, Ricardo Wood, Charles Goldberg, Preetham Suresh, Michael Yip [Paper link][Website][Video] |

|
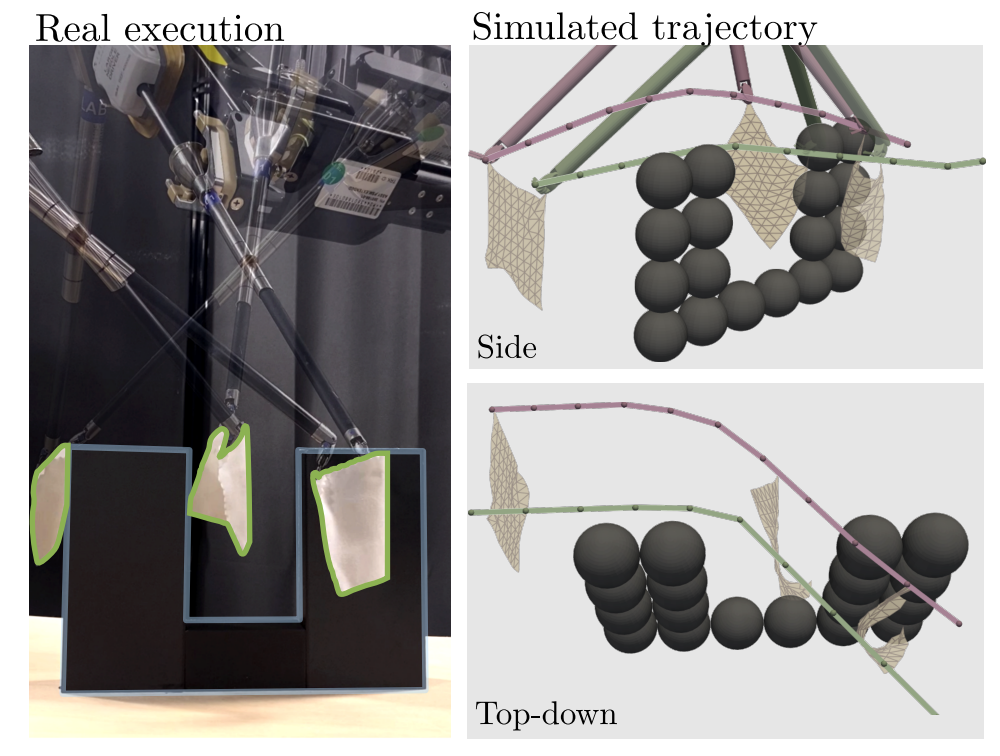
Xiao Liang*, Youcheng Zhang*, Fei Liu, Florian Richter, Michael C. Yip IEEE International Conference on Robotics and Automation (ICRA), 2025, [Best Paper Finalist]. [Paper link] |
|
Xiao Liang*, Chung-pang Wang*, Nikhil Shinde, Fei Liu, Florian Richter, Michael C. Yip IEEE International Conference on Robotics and Automation (ICRA), 2025, [Best Workshop Paper Finalist @ELSR]. [Paper link] |
|
Nikhil Shinde, Xiao Liang, Florian Richter, Sylvia Lee Herbert, Michael C. Yip IEEE International Conference on Automation Science and Engineering (CASE), 2024. [Paper link] |
|
Xiao Liang*, Nikhil Shinde*, Fei Liu, Yutong Zhang, Florian Richter, Sylvia Lee Herbert, Michael C. Yip Robotics: Science and Systems (RSS), 2024, [Best Workshop Abstract @ICRA2025]. [Paper link] |
|
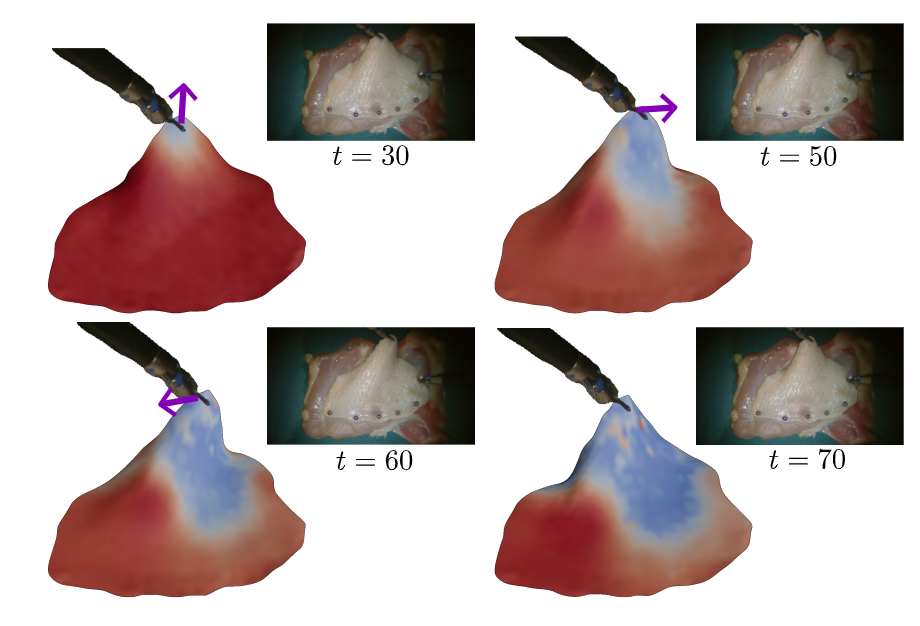
Xiao Liang*, Fei Liu*, Yutong Zhang, Yuelei Li, Shan Lin, Michael C. Yip IEEE International Conference on Robotics and Automation (ICRA), 2024. [Paper link] |
|
Yutong Zhang*, Fei Liu*, Xiao Liang,Michael C. Yip IEEE International Conference on Robotics and Automation (ICRA), 2024. [Paper link] |
|
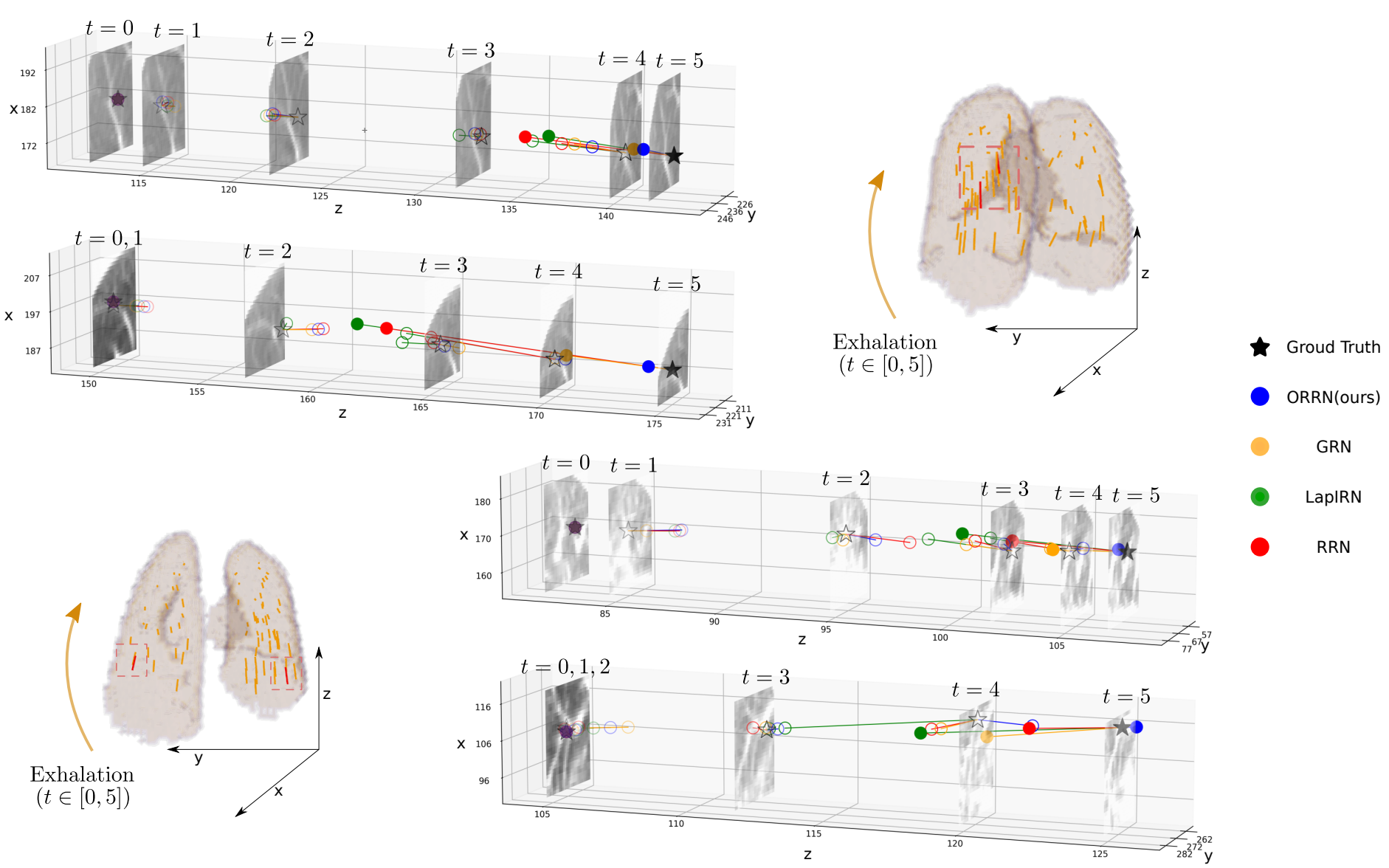
Xiao Liang, Shan Lin, Fei Liu, Dimitri Schreiber, Michael C. Yip IEEE Transactions on Biomedical Engineering (TBME), 2023 [Paper link] [Code] |
|
|
||
AR Interactive Cooking
An interactive application on Magic Leap's Mixed Reality device with semantic awareness powered by cloud-based deep learning models. [website] [code] |
VR Volume Rendering
Developed a real-time, interactive, volume rendering algorithm for visualizing 3D medical image in Head-mounted Virtual Reality. [summary] [code] |
Neural Process Safe Exploration
Developed a neural process guided safe exploration algorithm for polynial functions exploration and a movie recommendation problem. [summary] [code] |
|
Website templete from here. |